 ภาษาไทย
ภาษาไทย-
 English
English -
 Français
Français -
 日本語
日本語 -
 Deutsch
Deutsch -
 tiếng Việt
tiếng Việt -
 Italiano
Italiano -
 Nederlands
Nederlands - ภาษาไทย
-
 Polski
Polski -
 한국어
한국어 -
 Svenska
Svenska -
 magyar
magyar -
 Malay
Malay -
 বাংলা ভাষার
বাংলা ভাষার -
 Dansk
Dansk -
 Suomi
Suomi -
 हिन्दी
हिन्दी -
 Pilipino
Pilipino -
 Türkçe
Türkçe -
 Gaeilge
Gaeilge -
 العربية
العربية -
 Indonesia
Indonesia -
 Norsk
Norsk -
 تمل
تمل -
 český
český -
 ελληνικά
ελληνικά -
 український
український -
 Javanese
Javanese -
 فارسی
فارسی -
 தமிழ்
தமிழ் -
 తెలుగు
తెలుగు -
 नेपाली
नेपाली -
 Burmese
Burmese -
 български
български -
 ລາວ
ລາວ -
 Latine
Latine -
 Қазақша
Қазақша -
 Euskal
Euskal -
 Azərbaycan
Azərbaycan -
 Slovenský jazyk
Slovenský jazyk -
 Македонски
Македонски -
 Lietuvos
Lietuvos -
 Eesti Keel
Eesti Keel -
 Română
Română -
 Slovenski
Slovenski -
 मराठी
मराठी -
 Srpski језик
Srpski језик -
 Español
Español -
 Português
Português











เครื่องหมุนป้อมปืนอัตโนมัติและเครื่องกัด
โดยทั่วไปแล้วเครื่องหมุนป้อมปืนอัตโนมัติและเครื่องกัดมักจะมีป้อมปืนเครื่องมือที่สามารถเก็บเครื่องมือตัดหลายตัว ป้อมปืนสามารถจัดทำดัชนีโดยอัตโนมัติเพื่อเลือกเครื่องมือที่เหมาะสมสำหรับการดำเนินการเครื่องตัดเฉือนแต่ละครั้งลดเวลาการตั้งค่าและเพิ่มประสิทธิภาพ
แบบอย่าง:CK46DTY
ส่งคำถาม
รายละเอียดสินค้า
เครื่องหมุนป้อมปืนอัตโนมัติและเครื่องกัดเหล่านี้ยังสามารถดำเนินการมิลลิ่งได้ช่วยให้สามารถสร้างรูปร่างที่ซับซ้อนคุณสมบัติและรูปทรงโดยการย้ายเครื่องมือตัดในทิศทางต่าง ๆ การโม่ขยายขีดความสามารถในการตัดเฉือนของเครื่องนอกเหนือจากการหมุนอย่างง่าย
ไดอะแกรมการเดินทางของเครื่องจักร
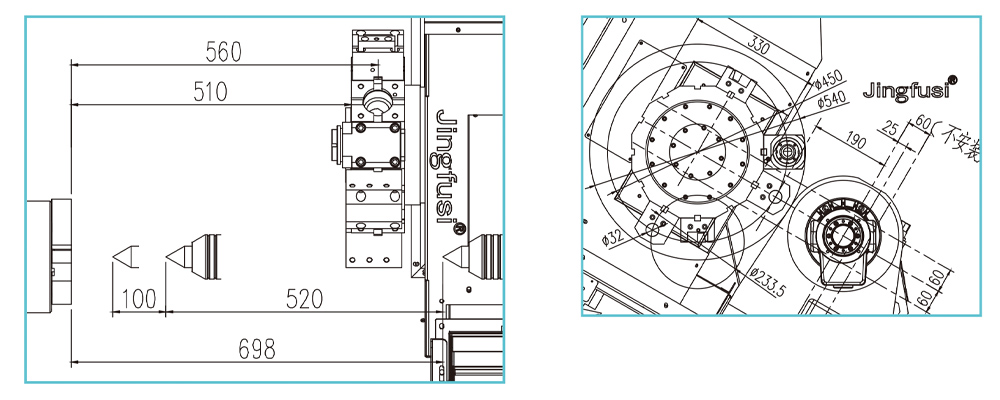
รายละเอียดผลิตภัณฑ์

รายการพารามิเตอร์
| รายการ | แบบจำลองของเครื่องกลึง | หน่วย | ck52dty | ck76dty | ck46dty |
| ขอบเขตการประมวลผล | เส้นผ่านศูนย์กลางการหมุนสูงสุดของแกนหมุน | มม. | Ø 700 | ||
| ความยาววงกลมด้านนอกเปลี่ยนสูงสุด | มม. | 520 | |||
| เส้นผ่านศูนย์กลางแท่งสูงสุด | มม. | Ø 55 | Ø 72 | Ø 45 | |
| แกนหลัก | ความเร็วแกนหมุนสูงสุด | r/นาที | 4200 (ตั้งค่า 3500) | 3200 (การตั้งค่า 2000) | 6000 (ตั้ง 4500) |
| ประเภทหัวแกนหมุน |
|
A2 - 6 | a2 -8 | A2 - 5 | |
| เส้นผ่านศูนย์กลางของแกนหมุน | มม. | Ø 66 | Ø 86 | Ø 56 | |
| ให้อาหาร | แกน x/z/y จังหวะสูงสุด | มม. | 260/500/± 60 | ||
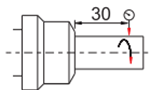
| หัวพลังงาน 90 °ผ่านศูนย์กลางของแกนหมุน | มม. | 30 | |||
| การเคลื่อนที่อย่างรวดเร็วสูงสุดของแกน x/z/y | m/ของฉัน | 24 (การตั้งค่า 16)/ 24 (การตั้งค่า 16)/ 14 (การตั้งค่า 8) | |||
| แกนแกนแกน x/z/y | มม. | 40 | |||
| แทร็กแกนแกน x/z/y | มม. | 35/45/35 | |||
| ป้อมปืน |
รุ่น Power Turret (Power Turret) | BMT | BMT55 | ||
| คอลเล็ตหัว | เป็น | ER32 | |||
| ขนาดตัวยึดเครื่องมือคงที่ | มม. | 25x25 | |||
| เส้นผ่านศูนย์กลางของผู้ถือ | มม. | Ø32 | |||
| เครื่องจักรไฟฟ้า | พลังมอเตอร์หลัก/แรงบิด | kw / nm | 11kW/จัดอันดับ 72Nm | 15kW/คะแนน 98Nm | 7.5 kW/คะแนน 47nm |
| X/Z/Y Axis Motor Power/Torque | kw / nm | Yaskawa 2.9 kw /18.6nm,optional รุ่นใหม่ 3.1 kw /15nm | |||
| พลังงาน/แรงบิดของมอเตอร์หัวพลังงานป้อมปืน | kw / nm | รุ่นใหม่ 3.1 kW/15nm | |||
| ความเร็วสูงสุดของมอเตอร์พลังงานป้อมปืน | r/นาที | 6000 (การตั้งค่า 4000), Speed≤4000ทั่วไป | |||
| พลังมอเตอร์พลัง/แรงบิด | kw / nm | 3.1 kW/15nm | |||
| พลังงาน/แรงบิดของเครื่องมือเปลี่ยนมอเตอร์ | kw / nm | รุ่นใหม่ 1.0 kw /3.1nm | |||
| tailstock | Tailstock Stroke | มม. | 520 | ||
| จังหวะไฮดรอลิกสูงสุดของ tailstock |
มม. | 100 | |||
| Tailstock Top เข็ม Taper Taper Taper | MK | Mohs 5# | |||
| ระยะห่างสูงสุดระหว่างปลายและชัค | มม. | 690 | |||
| อื่น | อุปกรณ์เบรกวางตำแหน่งแกนหมุน |
|
ไฮดรอลิกโปรแกรมเสริมสามารถตั้งโปรแกรมได้ | ||
| ความเอียงของเตียง | ° | 30 °หรือ 15 ° | |||
| เครื่องมือเครื่องจักรความยาว x ความกว้าง x ความสูง | มม. | 2500x1680x1900 | |||
| น้ำหนักรวมของเครื่องทั้งหมด | กิโลกรัม | 5,000 กิโลกรัม | |||
| พลังงานทั้งหมด | กิโลวัตต์ | 20 | |||
| การใช้พลังงานโดยเฉลี่ย | kw / h | 3 | |||
ความแม่นยำของเครื่องมือเครื่องจักร
| ความแม่นยำของเครื่องมาตรฐาน Jingfus Factor: | ||||||||
| รายการทดสอบที่สำคัญ | แผนผังแผนผัง | วิธีการตรวจจับ |
มาตรฐานโรงงาน |
|||||
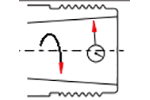
| จังหวะรัศมีแกนหมุน |

|
ตรวจจับ Runout of Outer Cone | 0.0035 | |||||
| ตำแหน่งการทำซ้ำแกน x |
|
ตรวจจับการวางตำแหน่งซ้ำของแกน x หมายเหตุ: ก่อนอื่นทำนายประมาณ 50 ครั้งเพื่อชดเชยข้อผิดพลาดของเครื่องยนต์เย็นและเครื่องยนต์ร้อนจากนั้นตรวจจับการวางตำแหน่งซ้ำ | 0.003 | |||||
| ตำแหน่ง z-axis ทำซ้ำ |
 |
ตรวจจับการวางตำแหน่งซ้ำ ๆ บนแกน z หมายเหตุ: ก่อนอื่นทำนายประมาณ 50 ครั้งเพื่อชดเชยข้อผิดพลาดของเครื่องยนต์เย็นและเครื่องยนต์ร้อนจากนั้นตรวจจับการวางตำแหน่งซ้ำ | 0.003 | |||||
| ตำแหน่งทำซ้ำแกน y |
|
ตรวจจับการวางตำแหน่งซ้ำ ๆ บนแกน y หมายเหตุ: ก่อนอื่นทำนายประมาณ 50 ครั้งเพื่อชดเชยข้อผิดพลาดของเครื่องยนต์เย็นและเครื่องยนต์ร้อนจากนั้นตรวจจับการวางตำแหน่งซ้ำ | 0.004 | |||||
| C Axis ทำซ้ำตำแหน่ง |
|
ตรวจจับการจัดตำแหน่งใหม่ของจุดคงที่แกน C, หมายเหตุ: ก่อนอื่นทำนายประมาณ 50 ครั้งเพื่อชดเชยข้อผิดพลาดของเครื่องยนต์เย็นและเครื่องยนต์ร้อนจากนั้นตรวจจับการวางตำแหน่งซ้ำ ๆ | 20 อาร์ควินาที | |||||
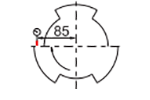
| C แกนตำแหน่งโรตารี่ |

|
ตรวจจับความแม่นยำของตำแหน่งแบบสุ่มของแกน C หมายเหตุ: ก่อนคาดการณ์ก่อนประมาณ 50 ครั้งเพื่อชดเชยข้อผิดพลาดของเครื่องยนต์เย็นและเครื่องยนต์ร้อนจากนั้นตรวจสอบการตั้งค่าซ้ำ ๆ | 72 อาร์ควินาที | |||||
| Power Head Clamping Beat |
|
จังหวะกรวย | 0.015 | |||||
| Power Head Clamping Beat |
 |
การตีหนีบ | 0.01 | |||||
| หากลูกค้าต้องการทดสอบความแม่นยำของ ISO หรือ VD1 ของแกน x/z/y มันจะถูกกำหนดในเวลาที่เขียนสัญญา ลูกค้าจะต้องทดสอบรายการนี้ในเวลาเดียวกันกับการยอมรับครั้งแรกของโรงงาน Jingfusi | ||||||||
แท็กยอดนิยม: เครื่องพลิกป้อมปืนอัตโนมัติและเครื่องกัด, จีน, ผู้ผลิต, ซัพพลายเออร์, โรงงาน, คุณภาพ, รายการราคา
แท็กสินค้า
ส่งคำถาม
โปรดส่งคำถามของคุณในแบบฟอร์มด้านล่าง เราจะตอบกลับคุณภายใน 24 ชั่วโมง









X
เราใช้คุกกี้เพื่อมอบประสบการณ์การท่องเว็บที่ดีขึ้น วิเคราะห์การเข้าชมไซต์ และปรับแต่งเนื้อหาในแบบของคุณ การใช้ไซต์นี้แสดงว่าคุณยอมรับการใช้คุกกี้ของเรา
นโยบายความเป็นส่วนตัว