 ภาษาไทย
ภาษาไทย-
 English
English -
 Français
Français -
 日本語
日本語 -
 Deutsch
Deutsch -
 tiếng Việt
tiếng Việt -
 Italiano
Italiano -
 Nederlands
Nederlands - ภาษาไทย
-
 Polski
Polski -
 한국어
한국어 -
 Svenska
Svenska -
 magyar
magyar -
 Malay
Malay -
 বাংলা ভাষার
বাংলা ভাষার -
 Dansk
Dansk -
 Suomi
Suomi -
 हिन्दी
हिन्दी -
 Pilipino
Pilipino -
 Türkçe
Türkçe -
 Gaeilge
Gaeilge -
 العربية
العربية -
 Indonesia
Indonesia -
 Norsk
Norsk -
 تمل
تمل -
 český
český -
 ελληνικά
ελληνικά -
 український
український -
 Javanese
Javanese -
 فارسی
فارسی -
 தமிழ்
தமிழ் -
 తెలుగు
తెలుగు -
 नेपाली
नेपाली -
 Burmese
Burmese -
 български
български -
 ລາວ
ລາວ -
 Latine
Latine -
 Қазақша
Қазақша -
 Euskal
Euskal -
 Azərbaycan
Azərbaycan -
 Slovenský jazyk
Slovenský jazyk -
 Македонски
Македонски -
 Lietuvos
Lietuvos -
 Eesti Keel
Eesti Keel -
 Română
Română -
 Slovenski
Slovenski -
 मराठी
मराठी -
 Srpski језик
Srpski језик -
 Español
Español -
 Português
Português












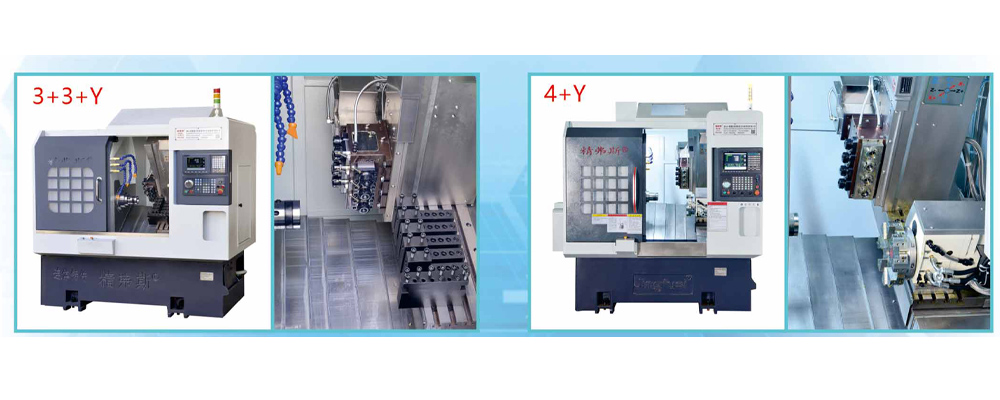
เครื่องหมุนและเครื่องกัด CNC อัตโนมัติ
เครื่องกลั่นและการกัด CNC อัตโนมัติเป็นอุปกรณ์การผลิตขั้นสูงที่ใช้กันอย่างแพร่หลายในอุตสาหกรรมต่าง ๆ เช่นการบินและอวกาศวิศวกรรมยานยนต์และความแม่นยำสำหรับการผลิตชิ้นส่วนที่ซับซ้อนและชุดประกอบ เครื่องนี้รวมฟังก์ชั่นการหมุนและการกัดเป็นหน่วยเดียวให้ความเก่งกาจและเพิ่มผลผลิต
แบบอย่าง:CK46-4+4+Y
ส่งคำถาม
รายละเอียดสินค้า
เครื่องหมุนและการกัด CNC อัตโนมัติเหล่านี้ติดตั้งระบบควบคุมตัวเลขคอมพิวเตอร์ที่ช่วยให้การใช้งานการตัดเฉือนที่แม่นยำและอัตโนมัติ ผู้ประกอบการใช้ซอฟต์แวร์ CAD/CAM ในการเขียนโปรแกรมเพื่อระบุขนาดชิ้นส่วนที่ต้องการและเส้นทางเครื่องมือ
เครื่องจักรกลหมุนและการกัด CNC อัตโนมัติเหล่านี้สามารถทำการหมุนและมิลลิ่งได้ การหมุนเกี่ยวข้องกับการหมุนชิ้นงานในขณะที่เครื่องมือตัดรูปร่างวัสดุในขณะที่การกัดนั้นเกี่ยวข้องกับชิ้นงานที่อยู่กับที่และเครื่องมือตัดหมุน
เครื่องจักรกลหมุนและการกัด CNC อัตโนมัติเหล่านี้สามารถทำการหมุนและมิลลิ่งได้ การหมุนเกี่ยวข้องกับการหมุนชิ้นงานในขณะที่เครื่องมือตัดรูปร่างวัสดุในขณะที่การกัดนั้นเกี่ยวข้องกับชิ้นงานที่อยู่กับที่และเครื่องมือตัดหมุน
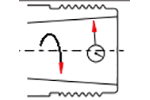
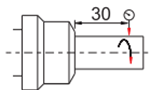
ไดอะแกรมการเดินทางของเครื่องจักร
รายละเอียดผลิตภัณฑ์

รายการพารามิเตอร์
| รายการ | แบบจำลองของเครื่องกลึง | หน่วย | CK46-4+4+Y | CK52-4+4+Y |
| ขอบเขตการประมวลผล | แกว่งไปมาบนเตียง | มม. | Ø 500 | |
| ความยาววงกลมด้านนอกเปลี่ยนสูงสุด | มม. | 320 | ||
| เส้นผ่านศูนย์กลางแท่งสูงสุด | มม. | Ø 45 | Ø 51 ~ 55 | |
| แกนหลัก | ประเภทหัวแกนหมุน |
|
A2-5 | A2-6 |
| เส้นผ่านศูนย์กลางของแกนหมุน | มม. | Ø 56 | Ø 66 | |
| ความเร็วแกนหมุนสูงสุด | r/นาที | 6000 (ตั้งค่าเป็น 4500) | 4500 (ตั้งค่าเป็น 3,500) | |
| ให้อาหาร | การเดินทางที่มีประสิทธิภาพของแกน x/z/y | มม. | 800/470/260 | |
|
การเคลื่อนที่อย่างรวดเร็วสูงสุดของแกน x/z/y |
m/ของฉัน | 24 (การตั้งค่า 18)/24 (การตั้งค่า 18)/15 (การตั้งค่า 8) | ||
| แกนแกนแกน x/z/y | มม. | 32/32/25 | ||
| รางแกน x/z/y | มม. | 35/35/25 | ||
| หอคอยมีด |
ป้อมปืนแปดสถานี | พีซี | 8 สถานีสามารถติดตั้งตัวยึดเครื่องมือสองหลุมได้เป็นทางเลือกด้วย 12 สถานี | |
| หัวพลัง | รูปแบบการถือเครื่องมือหัวพาไฟฟ้า |
|
ER25 | |
| เครื่องมือหัว | พีซี | Z-Axis 4+X-Axis 4 โดยติดตั้งตัวยึดเครื่องมือคงที่เพิ่มเติม 4 ตัวติดตั้ง | ||
| ความเร็วสูงสุดของหัวพลังงาน | r/นาที | 6000 (ตั้งค่าเป็น 4000) สามารถใช้ในการประมวลผลผลิตภัณฑ์จาก 4000 | ||
| ระยะห่างระหว่างเพลาหัวหัวและเพลา | มม. | 65 | ||
| เครื่องจักรไฟฟ้า | พลังมอเตอร์หลัก/แรงบิด | kw / nm | รุ่นใหม่ 7.5kW, 47.75Nm ชิ้นส่วนเหล็กที่มีความสามารถในการประมวลผลมากกว่า 80 สามารถเลือกได้ด้วย 11kW, 70.03nm | |
| X/Z/Y Axis Motor Power/Torque | kw / nm | 1.3kW/8.39nm | ||
| X/Z Power Head Motor Power/Torque | kw / nm | 1.7 kW/8nm | ||
| ความเร็วสูงสุดของมอเตอร์หัวไฟ | r/นาที | 5000 | ||
| อื่น | อุปกรณ์เบรกวางตำแหน่งแกนหมุน |
|
แรงดันไฮดรอลิก | |
| ความเอียงของเตียง | ° | 35 ° | ||
| เครื่องมือเครื่องจักรความยาว x ความกว้าง x ความสูง | มม. | 2200x1580x1900 | ||
| น้ำหนักรวมของเครื่องทั้งหมด | กิโลกรัม | 3430 | ||
| พลังงานทั้งหมด | กิโลวัตต์ | 13 | ||
| การใช้พลังงานโดยเฉลี่ย | kw / h | 2 | ||
ความแม่นยำของเครื่องมือเครื่องจักร
| ความแม่นยำของเครื่องมาตรฐาน Jingfus Factor: | ||||||||
| รายการทดสอบที่สำคัญ | แผนผังแผนผัง | มาตรฐานโรงงาน | ||||||
| จังหวะรัศมีแกนหมุน |

|
ตรวจจับ Runout of Outer Cone | 0.0035 | |||||
| ตำแหน่งการทำซ้ำแกน x |
|
ตรวจจับการวางตำแหน่งซ้ำของแกน x หมายเหตุ: ก่อนอื่นทำนายประมาณ 50 ครั้งเพื่อชดเชยข้อผิดพลาดของเครื่องยนต์เย็นและเครื่องยนต์ร้อนจากนั้นตรวจจับการวางตำแหน่งซ้ำ | 0.003 | |||||
| ตำแหน่ง z-axis ทำซ้ำ |
 |
ตรวจจับการวางตำแหน่งซ้ำ ๆ บนแกน z หมายเหตุ: ก่อนอื่นทำนายประมาณ 50 ครั้งเพื่อชดเชยข้อผิดพลาดของเครื่องยนต์เย็นและเครื่องยนต์ร้อนจากนั้นตรวจจับการวางตำแหน่งซ้ำ | 0.003 | |||||
| ตำแหน่งทำซ้ำแกน y |

|
ตรวจจับการวางตำแหน่งซ้ำ ๆ บนแกน y หมายเหตุ: ก่อนอื่นทำนายประมาณ 50 ครั้งเพื่อชดเชยข้อผิดพลาดของเครื่องยนต์เย็นและเครื่องยนต์ร้อนจากนั้นตรวจจับการวางตำแหน่งซ้ำ | 0.004 | |||||
| C Axis ทำซ้ำตำแหน่ง |
|
ตรวจจับการจัดตำแหน่งใหม่ของจุดคงที่แกน C, หมายเหตุ: ก่อนอื่นทำนายประมาณ 50 ครั้งเพื่อชดเชยข้อผิดพลาดของเครื่องยนต์เย็นและเครื่องยนต์ร้อนจากนั้นตรวจจับการวางตำแหน่งซ้ำ ๆ | 20 อาร์ควินาที | |||||
| C แกนตำแหน่งโรตารี่ |

|
ตรวจจับความแม่นยำของตำแหน่งแบบสุ่มของแกน C หมายเหตุ: ก่อนคาดการณ์ก่อนประมาณ 50 ครั้งเพื่อชดเชยข้อผิดพลาดของเครื่องยนต์เย็นและเครื่องยนต์ร้อนจากนั้นตรวจสอบการตั้งค่าซ้ำ ๆ | 72 อาร์ควินาที | |||||
| Power Head Clamping Beat |
|
จังหวะกรวย | 0.015 | |||||
| Power Head Clamping Beat |
 |
การตีหนีบ | 0.01 | |||||
| หากลูกค้าต้องการทดสอบความแม่นยำของ ISO หรือ VD1 ของแกน x/z/y มันจะถูกกำหนดในเวลาที่เขียนสัญญา ลูกค้าจะต้องทดสอบรายการนี้ในเวลาเดียวกันกับการยอมรับครั้งแรกของโรงงาน Jingfusi | ||||||||
แท็กยอดนิยม: เครื่องจักรกลหมุนและมิลลิ่ง CNC อัตโนมัติ, จีน, ผู้ผลิต, ซัพพลายเออร์, โรงงาน, คุณภาพ, รายการราคา
ส่งคำถาม
โปรดส่งคำถามของคุณในแบบฟอร์มด้านล่าง เราจะตอบกลับคุณภายใน 24 ชั่วโมง









X
We use cookies to offer you a better browsing experience, analyze site traffic and personalize content. By using this site, you agree to our use of cookies.
Privacy Policy